
(Page mise à jour par Benjamin le 09/11/2023)
La surveillance du fonctionnement des moteurs d’avions a longtemps fait appel à des instruments analogiques : compte-tours, pression d’huile, pression d’admission, températures diverses…etc. De nos jours, tous ces instruments sont souvent remplacés par un EMS (Engine Monitoring System) où les informations émanant de nombreux capteurs sont centralisées et affichées sur un seul écran.
Sur cette page, nous allons décrire l’unité principale de l’EMS AvionicsDuino. Le lecteur est invité à se reporter à la rubrique « Technique » de ce site. Elle comporte la description de la plupart des capteurs des moteurs Rotax 91x. Ces moteurs sont très répandus dans le monde de la construction amateur et des ultra-légers. Les capteurs utilisés sur d’autres moteurs sont parfois identiques ou reposent bien souvent sur des principes similaires. Beaucoup de capteurs étudiés à la rubrique « Technique » ne sont d’ailleurs pas spécifiques des moteurs Rotax (thermocouples, shunts, sondes lambda, capteurs de débit…etc.)
Présentation générale de l’EMS AvionicsDuino
Cet EMS est donc plus particulièrement adapté aux moteurs Rotax de la série 91x. Les paramètres suivants sont surveillés directement par l’unité principale de l’EMS :
- Températures des culasses 2 et 3
- Température et pression d’huile
- Pression d’admission
- Tensions du bus d’endurance qui alimente l’EMS
- Intensités de charge/décharge de la batterie
- Intensité appelée par le bus principal
- AFR (Air Fuel Ratio) en lien avec la sonde lambda
- Températures des gaz d’échappement des cylindres 3 et 4
La surveillance d’autres paramètres essentiels est confiée au module micro-EMS décrit ailleurs sur ce site. Ce micro-EMS fait donc partie intégrante du système EMS. Les paramètres surveillés par ce module sont transmis via le CAN Bus et affichés par l’écran de l’unité principale de l’EMS, il s’agit de :
- Vitesse de rotation du moteur (RPM)
- Débit carburant
- Niveau du carburant dans le réservoir (calculé et mesuré)
- Tension de la batterie qui alimente directement le micro-EMS
Architecture générale de l’EMS
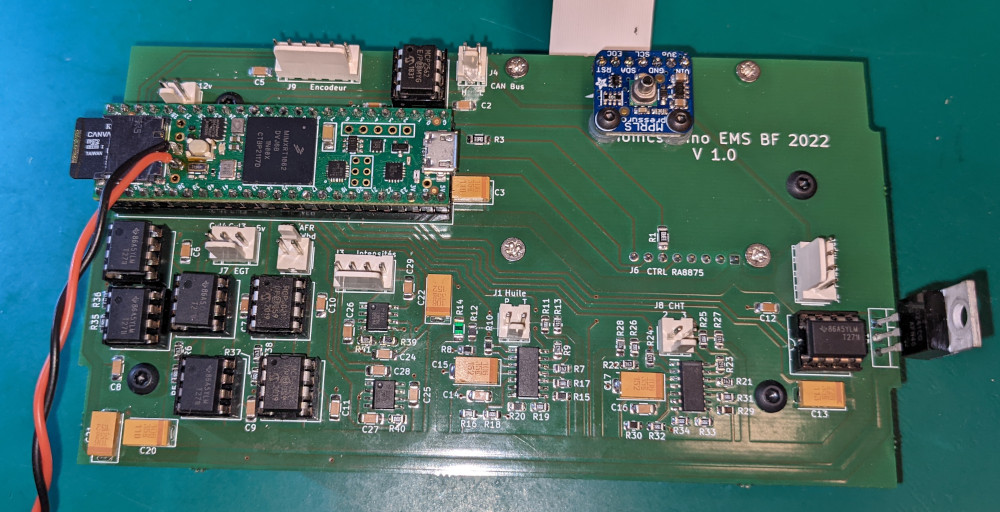
L’unité principale est représentée dans la partie inférieure du schéma ci-dessous. Ses composants principaux sont une carte Teensy 4.1 et un écran TFT couleur de 5″ (Riverdi TFT LCD 800x480px 1000cd/m2 IPS 5.0″ RVT50HQTFWN00). Le micro-EMS, représenté dans la partie supérieure, comporte une carte Teensy 4.0 et un petit écran OLED monochrome (fig. 1). Les deux unités communiquent via le CAN bus.
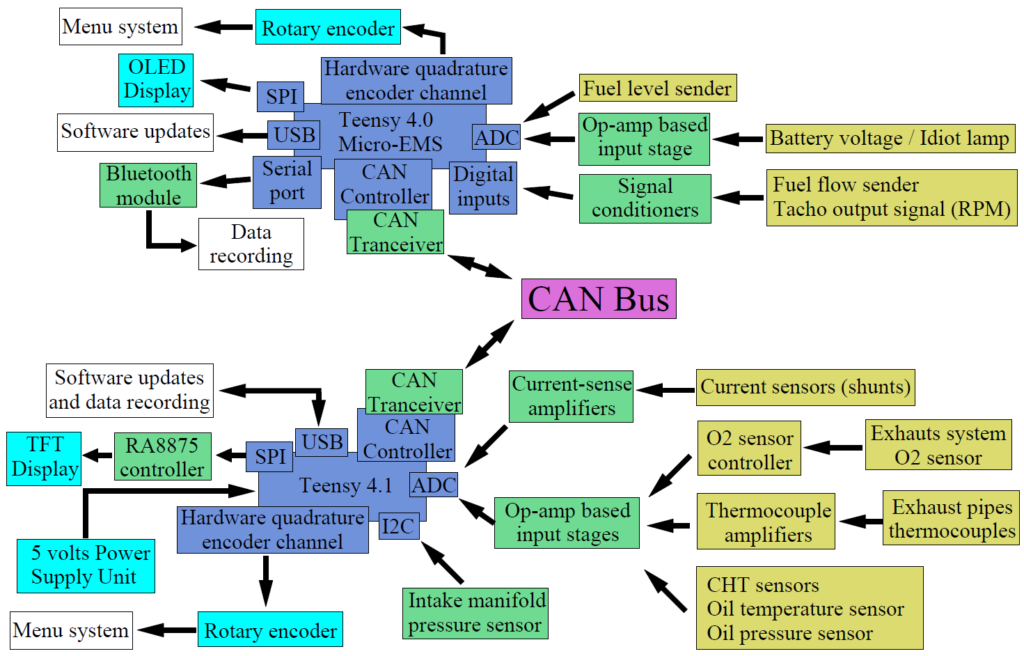
En dehors du capteur de pression d’admission numérique qui est connecté en I2C, et des capteurs pris en charge par le micro-EMS, tous les autres capteurs ont une sortie analogique et fournissent un signal qui est une tension continue comprise entre 0 et 3,3 volts pour certains, entre 0 et 5 volts pour d’autres. Ces tensions doivent être numérisées par un des convertisseurs analogique-numériques (CAN) de la carte Teensy 4.1. Mais auparavant, elles sont traitées par un étage d’entrée approprié, soit pour adapter les impédances, soit pour ramener les tensions de la plage 0-5 V dans la plage 0-3,3 V, soit pour amplifier certaines tensions insuffisantes afin d’exploiter toute la plage du CAN, soit enfin pour leur appliquer un offset si nécessaire, et parfois pour plusieurs de ces raisons. Ces étages d’entrée font appel à la technologie des amplificateurs opérationnels et sont décrits en détail dans les différentes pages consacrées aux capteurs, dans la rubrique « Technique ». Les résistances qui contrôlent les gains et les offsets de ces amplificateurs opérationnels ont toutes des tolérances de 0,1 %, ce qui permet d’obtenir une grande précision des résultats. Nos mesures expérimentales ont montré une précision au degré près pour les températures dans la plage de 50 à 150 °C, grâce également à une modélisation rigoureuse des capteurs, voir la page sur les capteurs dans la rubrique « Technique ».
EMS V1: Fichiers Gerber et perçage
EMS AvionicsDuino : code source sur GitHub
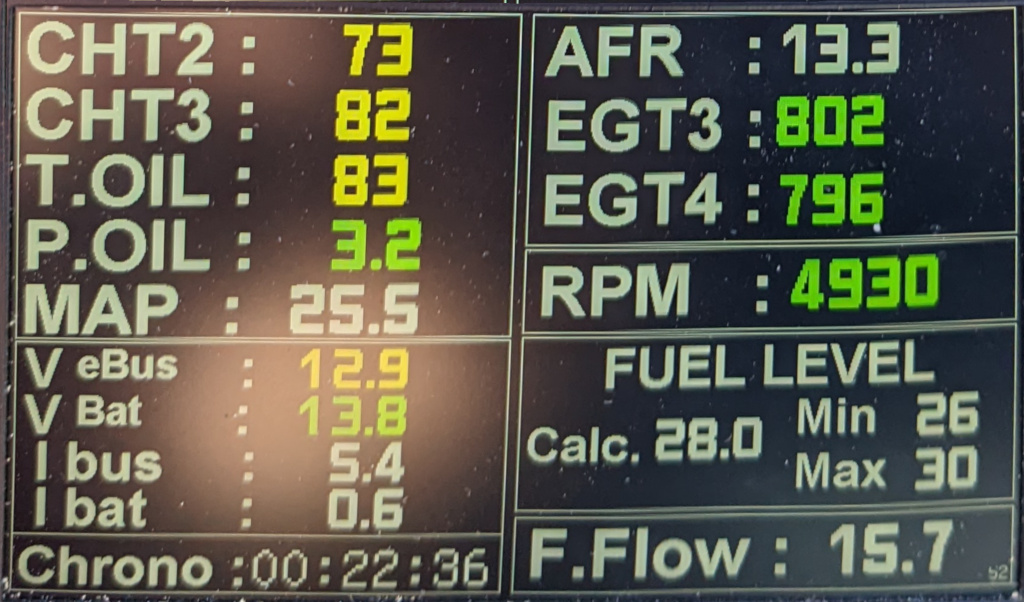
La vidéo ci-dessous a été faite lors d’un des premiers vols d’essai avec l’EFIS-EMS AvionicsDuino, le 3 septembre 2022. Le programme de l’EMS en était encore à une première version d’essai. La version en téléchargement ci-dessous apporte de nombreuses améliorations : implémentation de la pression d’admission, d’un système de menus, d’un chronomètre, d’une fonction permettant la connexion à l’enregistreur de vol, et bien sûr correction de quelques bugs (fig. 7).
L’interface visuelle reste pour l’instant très dépouillée, exclusivement alphanumérique. Sans recherche esthétique, mais hautement fonctionnelle et lisible. L’essentiel est là, et si le besoin se faisait sentir, le développement ultérieur d’une belle interface graphique ne poserait aucun problème technique.
Le bouton rotatif et la prise micro-USB de gauche sont ceux de l’EFIS. Les mêmes éléments à droite concernent l’EMS. Les prises USB en façade permettent non seulement de connecter l’enregistreur de paramètres, mais aussi de téléverser les mises à jour logicielles dans les deux cartes Teensy 4.1
Bonjour Stephane,
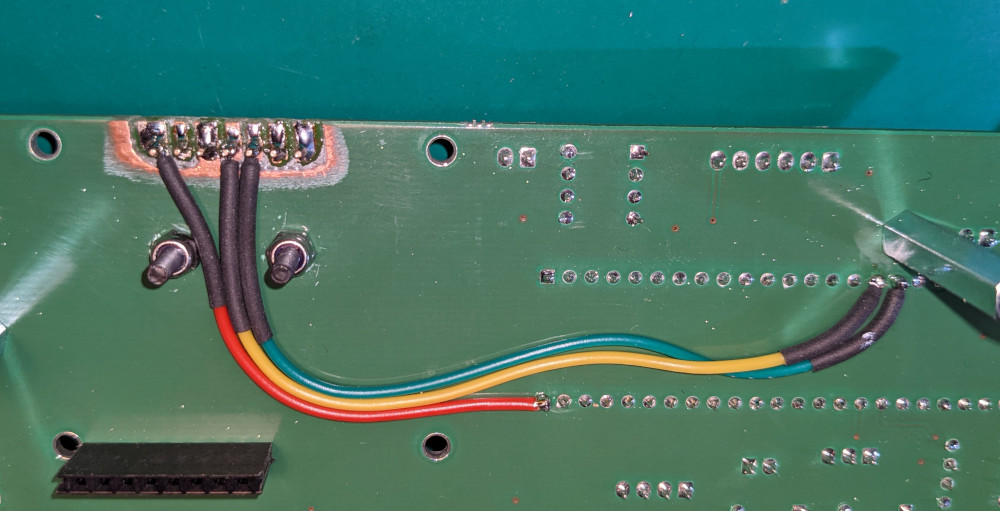
Effectivement, il est facile de fabriquer un adaptateur.
C’est ce que j’ai fait sur mon EMS où j’avais besoin de quelques centimètres de plus que la nappe du Grayhill.
Benjamin
Bonsoir Benjamin.
j’ai remarqué cela quand j’ai fait mon EMS. la prise pour l’encodeur ne correspond pas a celle de l’encodeur Grayhill. Ceci étant dit cela s’adapte.