
(Micro-EMS Teensy : dernière mise à jour par Benjamin le 19/05/2024)
Cette version entièrement repensée du Micro-EMS est animée par une carte Teensy 4.0. Ce nouveau système assure les mêmes fonctions que le Micro-EMS Arduino déjà présenté sur le site. À savoir la mesure du RPM, la gestion du niveau et du débit du carburant, et la surveillance de la tension de la batterie, avec une « Idiot Lamp ». Le Micro-EMS Arduino avait été conçu au départ comme un instrument indépendant, puis il a évolué grâce à l’ajout d’une connexion au réseau CAN de l’avion. Cette nouvelle version a quant à elle été d’emblée développée dans une perspective d’avionique modulaire intégrée.
Présentation du Micro-EMS Teensy
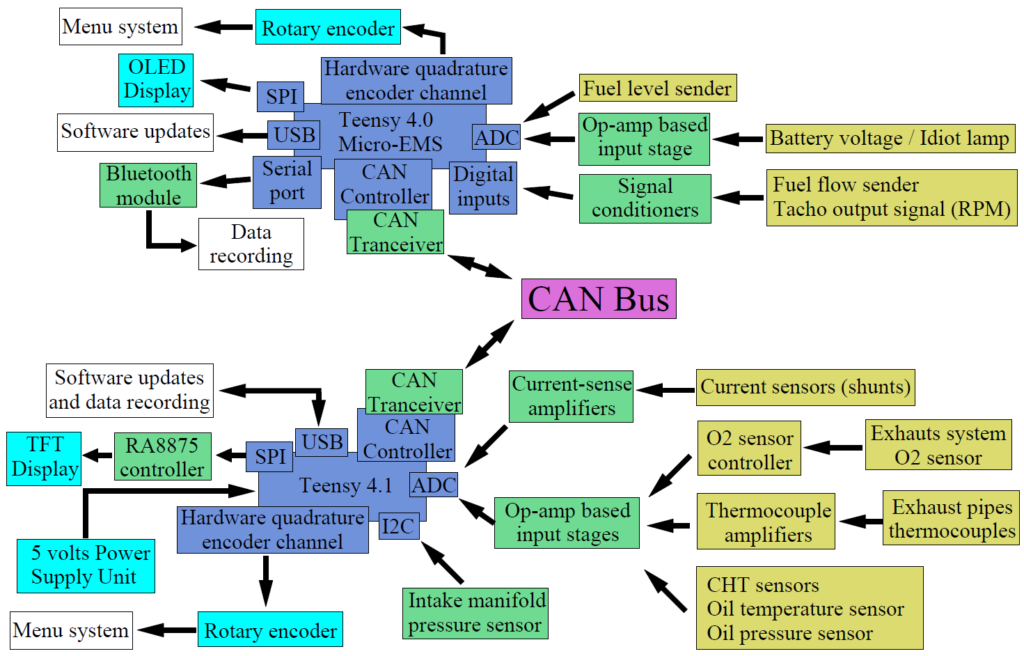
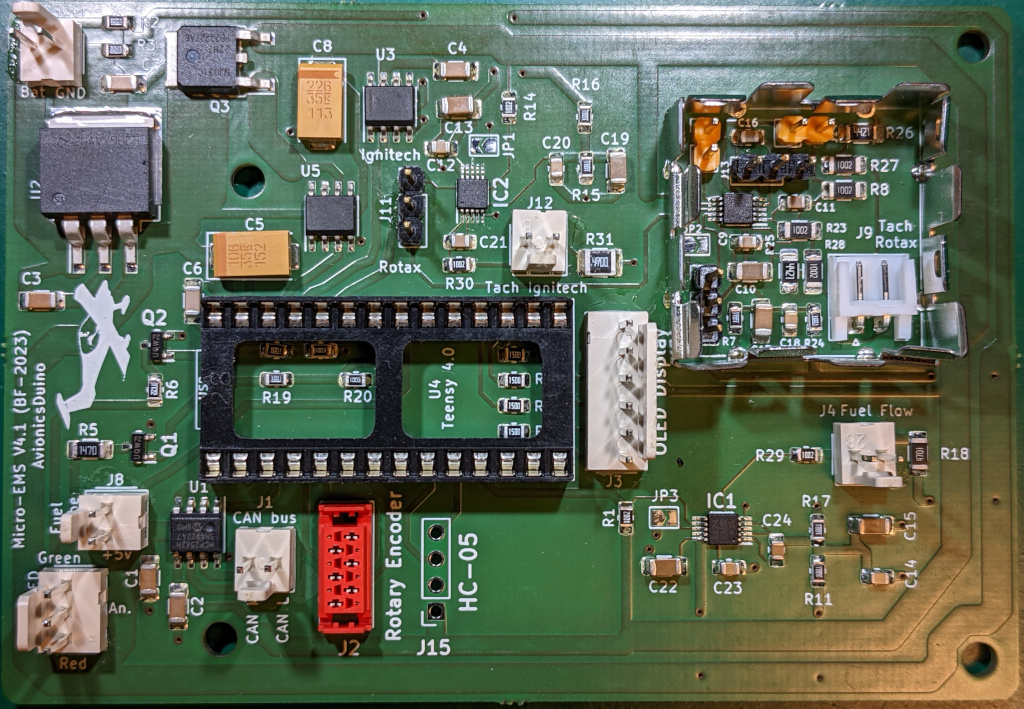
Le Micro-EMS Teensy est donc à considérer comme un module faisant partie intégrante du système de surveillance du moteur, ou EMS. L’architecture générale de l’EMS est présentée sur la figure 1. Le Micro-EMS est représenté dans la partie supérieure de cette figure. Il y a eu plusieurs versions successives du circuit imprimé (ou PCB), les vols d’essai ayant permis d’apporter progressivement des améliorations et de corriger les défauts initiaux, notamment de la fonction compte-tours. Le PCB présenté sur cette page est la version 4.1, la version logicielle actuelle est la 4.04.
Description du système
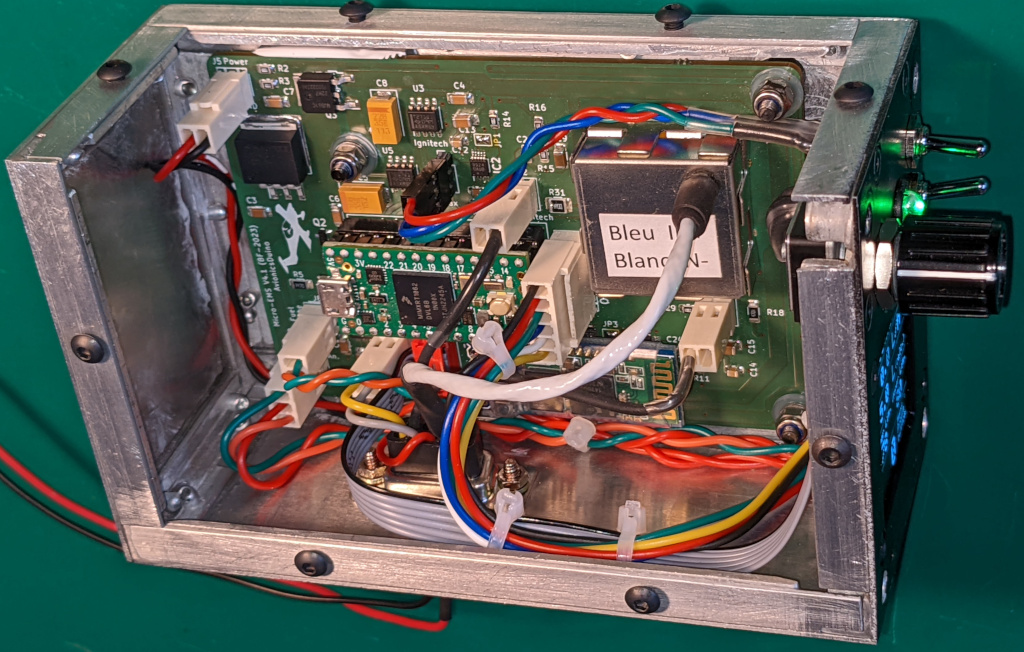
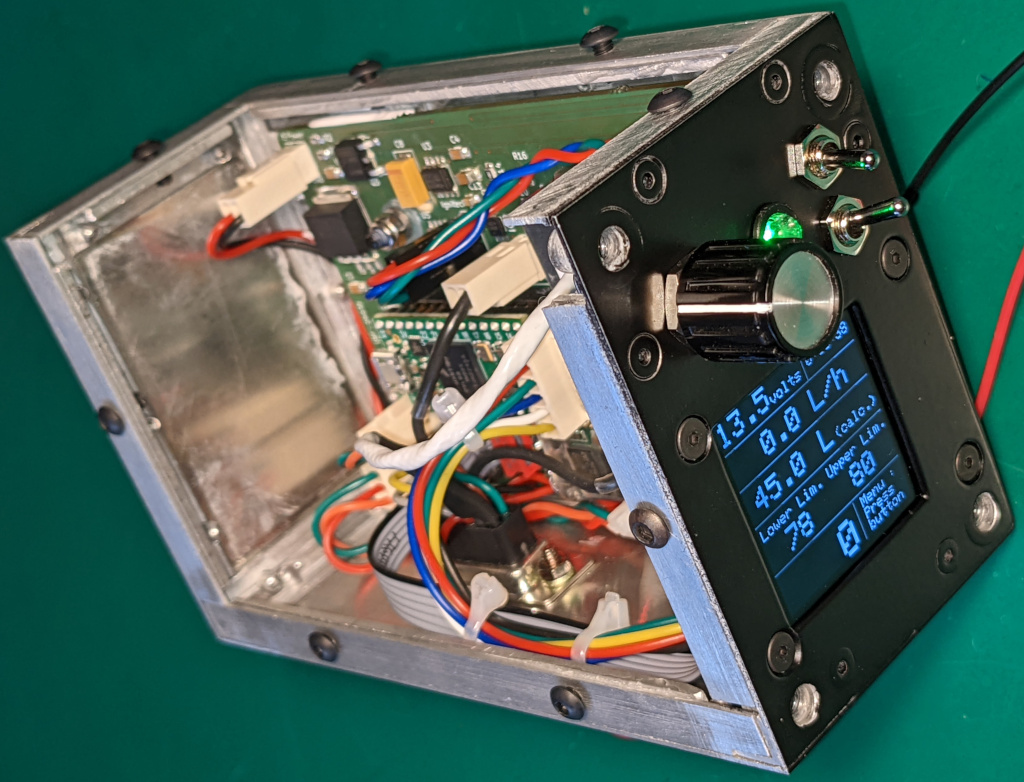
Ce nouveau Micro-EMS est monté dans le même MCR Sportser, en lieu et place de la version Arduino. La première version Teensy (PCB v 3.1) a été installée au mois d’avril 2023. Le système a par la suite été longuement testé en vol, ce qui a conduit à le modifier et à l’améliorer. La version actuelle (PCB v 4.1), désormais au point, est en vol depuis octobre 2023. Elle est plus compacte, l’écran couleur Adafruit 2.2 pouces des versions précédentes a été remplacé par un petit écran OLED monochrome 128×128.
En effet, cet écran n’est qu’un affichage accessoire, l’écran 5″ de l’EMS est l’affichage principal du système. Un codeur rotatif a été ajouté pour permettre de naviguer dans un système très simple de menus. Un module Bluetooth HC-05 permet de réaliser des enregistrements en vol sur un smartphone (ou une tablette) équipé d’un terminal série Bluetooth. Cette dernière fonction est tout à fait accessoire ; l’enregistreur de vol global, basé sur une carte ESP32 connectée au CAN bus, est beaucoup plus performant et fiable.
Galerie photos


Liens de téléchargement
Télécharger le logiciel sur GitHub (C’est le fichier Micro_EMS_V4_06.ino ou ultérieur qu’il faut utiliser avec cette version 4.1 du PCB). Le fichier Micro-EMS_V3_2.ino est laissée sur le dépot GitHub pour aider le lecteur qui souhaiterait s’en inspirer pour implémenter un écran graphique en lieu et place du petit OLED 128 x 128)
Connexions du Micro-EMS aux circuits de bord
Les connexions du Micro-EMS Teensy aux circuits de l’avion sont représentées sur la figure 8 (passer le pointeur de la souris sur l’image pour l’agrandir). Ces connexions se font par l’intermédiaire d’un connecteur D-SUB à 9 broches.
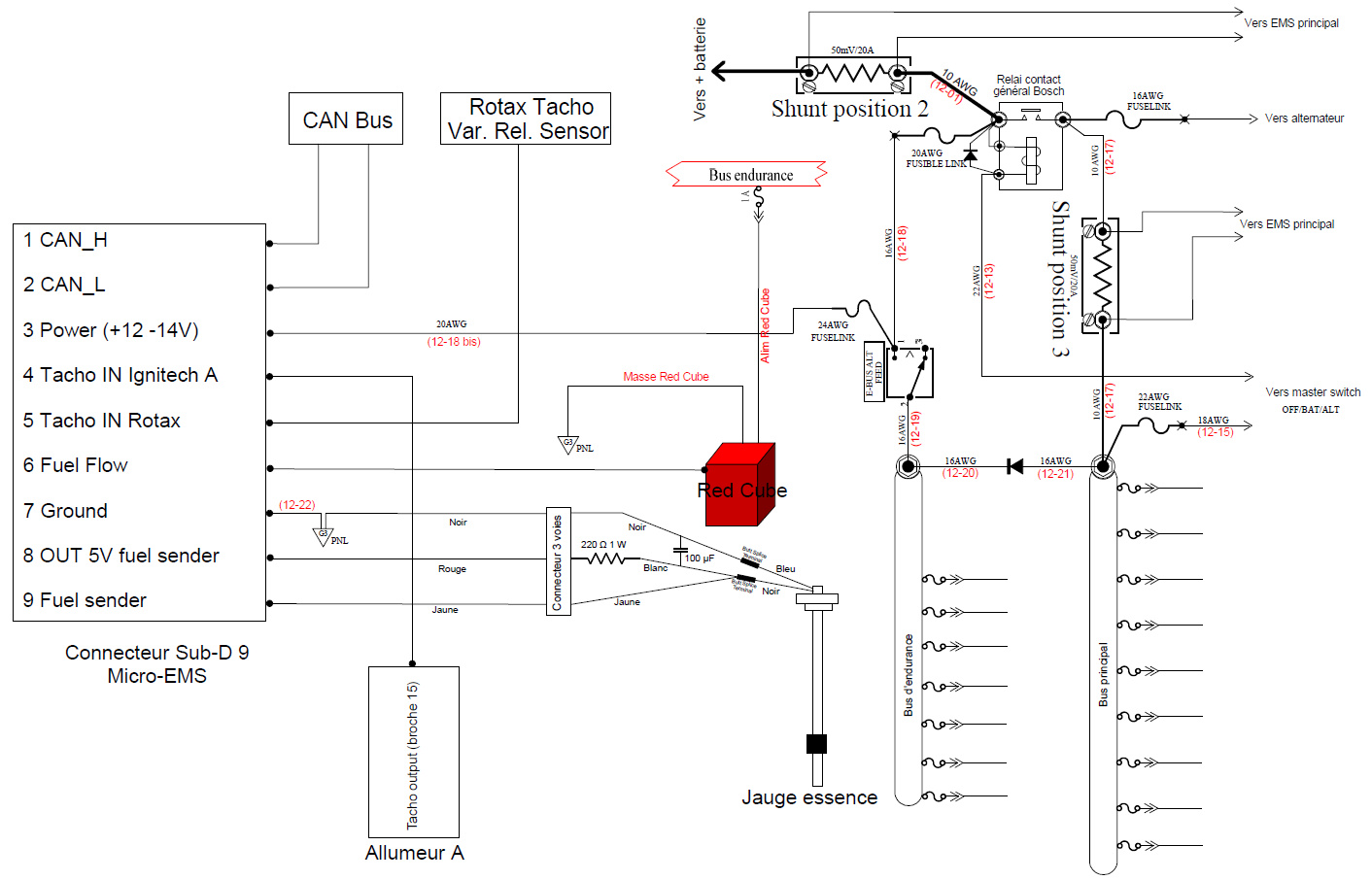
L’alimentation en 12-14 volts
L’alimentation électrique (SUB-D pin 3) provient directement de la batterie de l’avion, au travers de 2 fusible-links et du shunt en position 2. Un switch, non représenté sur la figure 8, permet de mettre le système sous ou hors tension. La batterie elle-même est par ailleurs équipée d’un coupe-batterie. Cette façon de connecter le Micro-EMS à la batterie permet d’en surveiller la tension sans mettre le master switch de l’avion sur ON. La connexion à la masse se fait sur la broche 7 de la SUB-D.
Sources pour le compte-tours
Il y a deux sources possibles (SUB-D pins 4 et 5) pour la fonction compte-tours : soit le capteur à réluctance variable du moteur Rotax, soit la sortie Tachometer d’un des deux allumeurs électroniques Ignitech.
Débit carburant
La sortie Signal du capteur de débit carburant FT-60 Red Cube passe par la broche SUB-D 6, la résistance pull-up nécessaire sur la sortie « open collector » de ce capteur est incluse sur le circuit imprimé du Micro-EMS.
Jauge à essence
Le Micro-EMS est prévu pour fonctionner avec une jauge à essence résistive. Celle qui équipe l’avion est une sonde résistive haute résolution WEMA S3 (0 à 190 Ohms) de 35 cm, sa résistance varie entre 0 ohms réservoir vide et 190 ohms avec le plein. Les 29 reed switches de cette sonde assurent une bonne résolution. Contrairement aux sondes capacitives, cette sonde est insensible à la nature du carburant : SP 98 ou 100LL, ou mélange des deux.
La sonde est utilisée en série avec une résistance de 220 ohms pour constituer un pont diviseur, ce pont étant alimenté en 5 volts par la broche SUB-D 8. La sortie du pont est appliquée sur la broche SUB-D 9. La particularité de ce montage est que cette résistance est située dans le connecteur 3 broches de la sonde elle-même, de façon à ne pas risquer de griller la carte Teensy en mettant par inadvertance le système sous tension alors que le réservoir a été déposé.
Si cette résistance était placée sur le PCB, l’oubli de reconnecter la jauge appliquerait alors directement une tension de 5 volts sur une broche analogique de la carte Teensy qui ne tolère que 3,3 volts. On a également placé un condensateur de 100µF dans ce connecteur pour amortir les variations rapides de la tension aux bornes de la sonde, liées aux ondulations à la surface du carburant.
Schéma électrique du Micro-EMS Teensy
Le schéma électrique est représenté sur la figure 9 (passer le pointeur de la souris sur l’image pour l’agrandir). Le « cerveau » de ce montage est une carte Teensy 4.0.
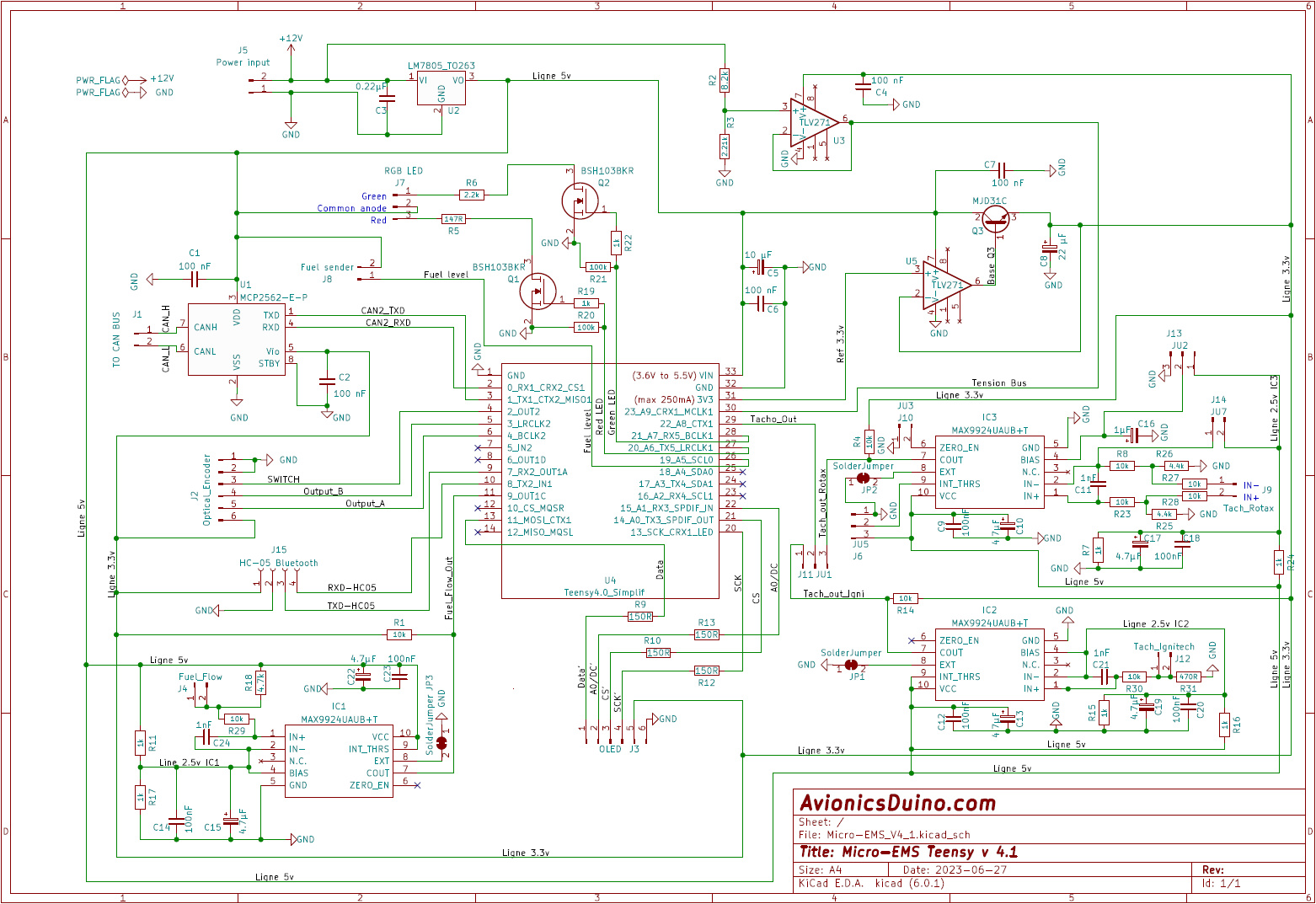
Alimentation 5 volts
L’alimentation 5 volts est obtenue grâce à un régulateur LM7805 (U2). Le courant d’environ 200 mA appelé par le Micro-EMS, couplé à la réduction de la tension de 13.7 volts (moteur tournant) à 5 volts, entraîne un échauffement significatif de ce régulateur linéaire, nécessitant des mesures de dissipation thermique : thermal vias sous le LM7805, pour faciliter les transferts thermiques vers le plan de masse du PCB, combinés à une entretoise en aluminium transférant la chaleur du PCB vers le boîtier aluminium.
Alimentation 3.3 volts
La sortie de 3,3 volts de la carte Teensy pourrait être insuffisante à elle seule, en raison du nombre de circuits à alimenter. Il lui a donc été adjoint un buffer afin d’autoriser un courant significatif sans courir le moindre risque de voir la tension de référence de 3,3 volts diminuer, ce qui pourrait fausser certaines mesures analogiques. Ce buffer est constitué par l’amplificateur opérationnel U5 et le transistor Q3.
Mesure de la tension de la batterie
La tension de la batterie est abaissée par le pont diviseur constitué par R2 et R3, et transmise à la broche analogique A9 de la Teensy (via l’amplificateur opérationnel U3 monté en suiveur, pour protéger A9 et adapter les impédances).
Conditionnement du signal du capteur compte-tours Rotax
Le signal analogique à haute tension en provenance du capteur à réluctance variable du Rotax est traité par un circuit spécialisé MAX9924 (IC3) qui assure la suppression des parasites et la conversion vers un signal numérique carré de 3,3 volts d’amplitude, de fréquence identique. Voir à ce sujet, dans la rubrique « Technique » de ce site, la page sur les capteurs à réluctance variable et le conditionnement du signal. Le fonctionnement du MAX9924 y est explicité en détail. Le signal de sortie de IC3 est appliqué (via le sélecteur J11-JU1) sur l’entrée digitale 22 de la Teensy (la seule exploitable avec la bibliothèque FreqMeasure qui mesure la période du signal).
Conditionnement du signal de la sortie tacho des allumeurs
Le signal grossièrement carré d’environ 15 volts d’amplitude en provenance de la sortie Tacho de l’allumeur Ignitech est traité par un autre MAX9924 (IC2) pour supprimer les parasites et assurer la conversion vers un signal numérique de 3,3 volts d’amplitude, appliqué sur l’entrée digitale 22 de la Teensy, via le sélecteur J11-JU1.
Conditionnement du signal du capteur de débit carburant
Le signal du capteur de débit carburant est traité par un troisième MAX9924 (IC1). La résistance R1 de 10k est une résistance pull-up pour la sortie open-drain du MAX9924. La résistance R18 (4,7 kΩ) est la résistance pull-up pour la sortie open-collector du capteur de débit Red Cube FT-60. La sortie COUT du MAX9924 est connectée à l’entrée digitale 9 de la carte Teensy (la seule exploitable avec la bibliothèque FreqCount qui compte les impulsions).
Voyant de basse tension « Idiot lamp »
Les transistors MOSFET Q1 et Q2 sont montés en commutateurs pour la diode RGB (utilisée comme « idiot lamp »), laquelle appelle un courant supérieur (surtout pour la couleur rouge) à la limite de 4 mA en continu, recommandée pour les sorties digitales de la carte Teensy.
Transceiver CAN
Le transceiver CAN MCP2562E/P (U1) est monté sur la sortie CAN2 de la carte Teensy (pins 0 et 1).
Ecran OLED
L’écran Adafruit OLED 1.5″ 128×128 pixels à contrôleur SSD1327 (Product ID : 4741) est connecté sur un bus SPI de la carte Teensy. Une résistance de 150 ohms est insérée en série sur les 4 lignes SPI, afin de diminuer les harmoniques à haute fréquence des signaux SPI, dans un but de limiter au maximum le risque d’interférence électromagnétique avec l’Installation Radioélectrique de Bord (IRB).
Module Bluetooth
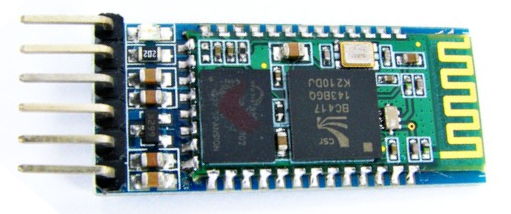
Les modules Bluetooth HC-05 comportent 6 broches (fig. 10), les deux broches les plus externes sont utilisées pour la configuration (par exemple pour changer le nom du module ou son mot de passe). Le lecteur est invité à consulter un des innombrables tutoriels qui figurent sur Internet pour cette configuration.
Une fois la configuration terminée, seules les 4 broches centrales sont utilisées pour le montage sur le PCB. Ces quatre broches doivent être soudées perpendiculairement au module et non dans l’axe comme sur tous les modules neufs. Il convient donc d’ôter le connecteur à 6 broches d’origine. Il faut pour cela commencer par sectionner les broches et ôter précautionneusement l’isolant noir à l’aide d’une mini-disqueuse Dremel. Puis dessouder individuellement les segments de broches restants avec une station de soudage/désoudage, et enfin nettoyer les trous du PCB avec de la tresse à dessouder.
Lorsque le micro-EMS est en fonction, il émet ses paramètres en permanence. Pour les enregistrer, il suffit d’appairer un smartphone ou une tablette Android, et d’utiliser le programme « Serial Bluetooth Terminal » de Kai Morich.
Résultats des tests en vol
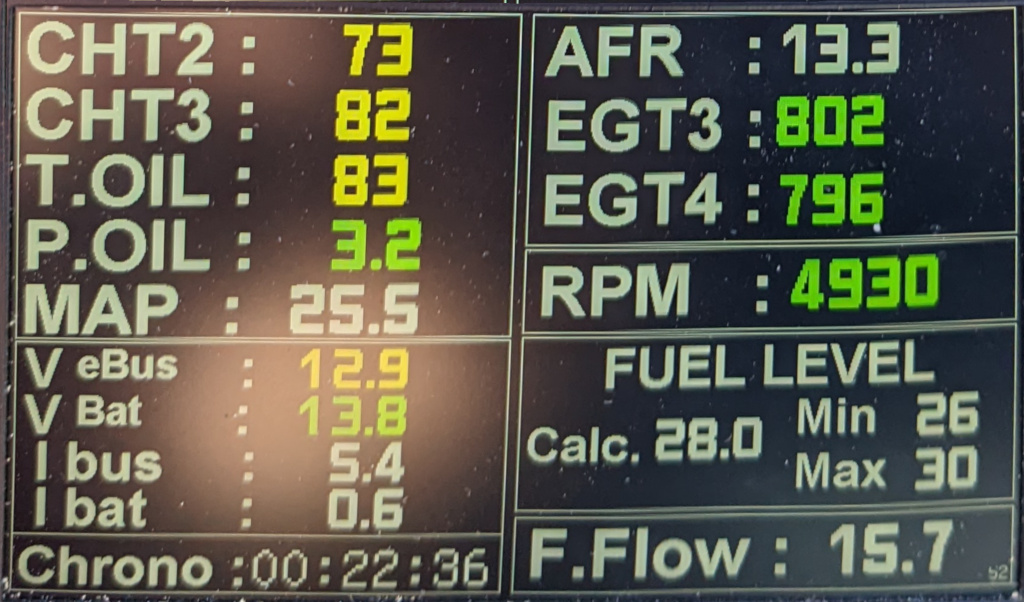
La tension de la batterie est toujours identique à ±0,05 volt par rapport à une mesure de référence réalisée avec un multimètre Fluke 115. La visibilité de la LED (idiot lamp) est excellente même en plein soleil.
Le RPM est identique à ±10 tours par minute au RPM de référence du contrôleur constant speed (Smart Avionics CSC-1/P) de l’hélice, quelle que soit l’entrée sélectionnée par le cavalier sur J11.
Le calculateur de carburant est très précis. L’affichage est stable. En fin de vol prolongé, les niveaux de carburant restant, d’une part calculé par le micro-EMS, et d’autre part mesuré manuellement dans le réservoir (avec une jauge en bois parfaitement étalonnée), ne diffèrent jamais de ±1 litre. Et ce niveau est toujours dans l’intervalle de 3 à 4 litres mesuré par la sonde Wema. Lequel intervalle est toujours cohérent avec la vérification systématique avec la jauge en bois avant et en fin de chaque vol.
Il a bien sûr fallu quelques vols de plus d’une heure pour ajuster le facteur K, selon la formule Kcorrigé = Kactuel x Quantité consommée calculée / Quantité consommée mesurée. Le facteur K retenu est de 19800 pour un litre, alors que le facteur K théorique du Red Cube est proche de 18000.
Avec la version Arduino du Micro-EMS aussi bien qu’avec un ancien calculateur de carburant MGL Stratomaster FF1, et toujours le même capteur Red Cube, on obtenait également un facteur K supérieur au facteur K théorique, ce qui pourrait faire penser à des impulsions surnuméraires liées aux vibrations et à l’installation rigide du Red Cube sur la cloison pare-feu. Le fabricant de ce capteur recommande plutôt une installation souple entre deux durits.