
(Le compas digital : page mise à jour par Benjamin le 14 août 2024)
Le compas magnétique, le chronomètre, le sextant et les cartes ont longtemps été les seuls instruments de navigation. Avec le loch dans la marine, puis l’anémomètre dans l’aéronautique, pour connaître la vitesse et estimer la distance parcourue en fonction du temps écoulé. Certains avions de la Seconde Guerre mondiale étaient équipés d’un astrodôme pour permettre au radio-navigateur de faire le point astronomique au sextant. À la fin des années 50, Air France avait équipé ses Super Starliners d’un sextant périscopique !
La radionavigation, puis le GPS, ont eu raison de ces techniques de navigation quasi ancestrales. Mais la navigation aérienne à l’estime, à la montre et au compas, reste enseignée. Et c’est heureux, car au stade d’élève pilote, cette base est indispensable à l’acquisition d’une bonne représentation mentale du temps et de l’espace dans lesquels évoluent nos aéronefs. Le pilote qui a acquis un peu d’expérience conserve sa montre, mais il ne regarde plus beaucoup son compas magnétique. Sauf parfois pour se rassurer en pensant qu’il pourra compter sur lui en cas de panne de son GPS ou de sa tablette… à la condition d’avoir conservé les réflexes utiles de la navigation à l’estime !
Le compas magnétique traditionnel, hors obligation réglementaire, est donc devenu peu utile, voire obsolète pour certains. Mais il conserve un autre intérêt, dans sa version digitale, lorsqu’il est couplé à un calculateur et à un GPS. Par exemple pour indiquer précisément au pilote la direction et la vitesse du vent, grâce à un calcul faisant intervenir la vitesse de l’avion, la route géographique fournie par le GPS, et le cap fourni par le compas, corrigé de la déclinaison.
Le champ magnétique terrestre
Le champ magnétique terrestre est établi entre les pôles magnétiques nord et sud, lesquels ne sont pas confondus avec les pôles géographiques, d’où la déclinaison magnétique. Entre ces pôles magnétiques s’établissent des lignes de champ qui sont grossièrement comparables à celles d’un simple barreau aimanté, représenté en rouge sur la figure 1.

On voit sur cette représentation schématique que les lignes de champ sont grossièrement parallèles à la surface terrestre aux environs de l’équateur, perpendiculaires à cette surface aux environs des pôles magnétiques et plus ou moins inclinées en fonction de la latitude. Mais quelle que soit la localisation géographique, la projection d’une ligne du champ magnétique sur un plan parallèle à la surface terrestre est toujours orientée vers un pôle magnétique. C’est ce qui est à la base du principe de la boussole, un instrument qui doit toujours être horizontal pour prétendre indiquer la direction du pôle magnétique.
Le magnétomètre
Le cœur d’un compas digital est constitué d’un magnétomètre triaxial. Ce capteur particulier analyse le champ magnétique environnant, et le décompose en trois vecteurs, selon les trois axes orthogonaux x, y et z de son propre repère cartésien.
Il existe une très grande variété de magnétomètres. Ceux qui nous intéressent dans le cadre de ce site sont de type magnétorésistif. Cette technologie permet d’obtenir des capteurs précis, sensibles et fiables, de taille inframillimétrique. Ce sont eux qui équipent tous les smartphones du commerce. Ces capteurs sont très souvent associés à des accéléromètres et des gyromètres, au sein d’une IMU (Inertial Measurement Unit).
Si un magnétomètre est posé horizontalement sur une table, axe z vertical, les axes x et y de ce magnétomètre sont donc dans un plan horizontal, parallèle à la surface terrestre. Dans ce cas particulier, l’analyse des seules composantes x et y suffit pour calculer l’orientation magnétique du magnétomètre.
Mais dans un avion, le magnétomètre, fixé à la structure, ne peut pas toujours être à l’horizontale. Par conséquent, en évolutions, le calcul de l’orientation magnétique devra faire intervenir les 3 axes du magnétomètre et intégrer l’attitude de l’avion en assiette et en inclinaison.
Dans le cadre de ce projet, nous avons choisi d’utiliser le capteur LIS3MDL de STMicroelectronics, sur une carte Adafruit. Ce capteur récent utilise le bus I2C ou le bus SPI pour communiquer. Plusieurs bibliothèques sont disponibles.
Le calibrage du magnétomètre
Le LIS3MDL est calibré en usine pour la sensibilité et le niveau zéro-gauss. Les facteurs correctifs sont stockés dans une mémoire non volatile, interne au capteur, et à chaque mise sous tension, ils sont chargés dans les registres internes pour être pris en compte durant l’utilisation. Ce calibrage particulier n’est donc pas à refaire par l’utilisateur.
Par contre, un calibrage particulièrement soigneux doit être réalisé par l’utilisateur, afin de prendre en compte l’environnement magnétique particulier du capteur, à son emplacement définitif dans l’avion. En effet, cet environnement peut perturber plus ou moins sévèrement le champ magnétique terrestre qui seul nous intéresse.
Il existe deux sources de perturbations magnétiques, dites fer-dur et fer-doux (hard iron and soft iron). Pour faire simple, fer dur désigne les objets qui produisent un champ magnétique, par exemple des aimants permanents ou des conducteurs où circule un courant électrique. Le fer doux désigne certains métaux comme le fer ou le nickel qui, bien que non aimantés, sont capables de dévier les lignes du champ magnétique terrestre.
Il existe sur Internet de très nombreux sites expliquant 1) la théorie de ces perturbations, 2) les techniques de calibrage et 3) les méthodes de compensation. Sans entrer dans des théories mathématiques complexes, qui nous dépassent, nous allons simplement aborder de façon très pratique les points 2 et 3, ce qui pourra aider le lecteur à calibrer n’importe quel magnétomètre, c’est-à-dire déterminer les coefficients nécessaires à la compensation.
Puis nous expliquerons comment introduire ces coefficients de compensation dans un algorithme, afin d’obtenir un cap magnétique exact, malgré les perturbations fer dur et fer doux de l’environnement du magnétomètre. Charge à l’utilisateur de tenir ensuite compte de la déclinaison du lieu où il vole pour calculer le cap géographique.
Il va sans dire que la plus élémentaire des précautions consiste surtout à installer le magnétomètre dans l’avion le plus loin possible de toutes les sources de perturbations. Par exemple dans un saumon d’aile, à la condition qu’il n’y circule pas de courants intermittents de très forte intensité, par exemple pour alimenter des feux à éclats…
La procédure de calibrage
Elle consiste à recueillir, dans l’environnement futur du magnétomètre, le plus grand nombre possible de mesures du champ magnétique, sur les 3 axes, et dans toutes les positions possibles du capteur. Il faut pour cela, après connexion du magnétomètre à un microcontrôleur (Arduino, Teensy, ou autre), uploader un sketch très simple qui envoie sur le terminal de l’IDE Arduino les valeurs brutes du champ magnétique sur les 3 axes.
Toutes les bibliothèques proposent ce type de sketch en exemple. Il faut adapter le sketch pour obtenir en sortie des données convenablement formatées pour l’outil qu’on va ensuite utiliser pour calculer les coefficients. Puis il faut lancer le sketch et faire tourner manuellement le capteur autour de tous ses axes, pendant au moins 30 à 60 secondes. Il suffit ensuite de faire un copier-coller du contenu de l’écran du terminal, et de l’enregistrer dans un fichier « txt », on obtient par exemple ceci :
Dans cet exemple, l’outil qui sera utilisé pour calculer les coefficients de calibration est le logiciel Magneto 1.2, téléchargeable ici. Le fichier txt doit être formaté (par exemple avec NotePad++, ou n’importe quel logiciel de traitement de texte et la fonction « rechercher-remplacer ») pour contenir sur chaque ligne les valeurs du champ magnétique, respectivement sur les axes x, y et z, simplement séparées par un espace.
Une fois les données enregistrées, il suffit de lancer Magneto 1.2, et de lui indiquer l’emplacement du fichier texte à traiter. Plus d’explications ici, notamment pour la saisie à effectuer dans la case « Norm of Magnetic or Gravitational Field ». Il faut procéder par approximations successives, jusqu’à ce que la moyenne des 3 cases en diagonale entourées en rouge sur la copie d’écran ci-dessous (Fig. 2) soit la plus proche possible de 1.
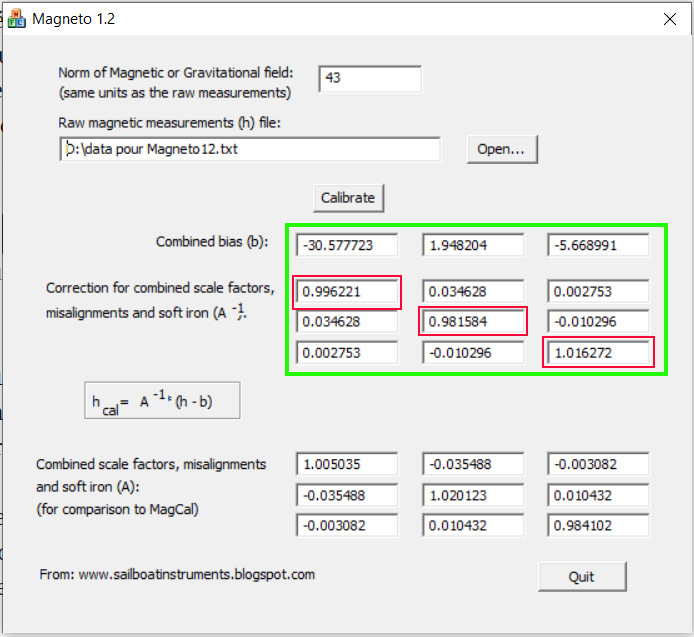
On a ainsi dans le cadre vert de la figure 2 tous les coefficients de calibrage qu’il faudra introduire à l’étape suivante dans le sketch exploitant le magnétomètre, afin de parfaitement compenser les distorsions fer dur et fer doux.
On peut obtenir ces coefficients avec un autre logiciel : MotionCal, téléchargeable ici. En fonction du système d’exploitation utilisé et des éventuelles protections antivirus, MotionCal peut parfois être un peu « rétif » au téléchargement, sans doute parce qu’il s’agit d’un fichier exécutable hébergé sur une page non sécurisée du site PJRC (le fabricant des cartes Teensy). En copiant et collant l’URL de la page de téléchargement dans un nouvel onglet du navigateur, cela règle généralement la question.
(http://www.pjrc.com/teensy/beta/imuread/MotionCal.exe).
Le principe de MotionCal est légèrement différent. Ce logiciel exploite en temps réel les données du magnétomètre, reçues sur le port série, sans avoir besoin de les enregistrer dans un fichier. Il faut pour cela fermer le terminal de l’IDE Arduino, et indiquer dans MotionCal quel port série utiliser. Il s’agit de celui où est connectée la carte Arduino ou Teensy.
Le formatage de la sortie des données vers le port série est un peu plus compliqué qu’avec Magneto 1.2, car MotionCal est prévu pour recevoir les données d’une IMU 9 DOF (accéléromètre triaxial + gyromètre triaxial + magnétomètre triaxial). Si on prend la première ligne du fichier prévu pour Magnéto 1.2, à savoir : « -52.27 -8.07 -40.49 », son formatage pour MotionCal serait : « raw:0,0,0,0,0,0,523,81,405 ». Les valeurs relevées sur les 3 axes du magnétomètre sont multipliées par 10 et arrondies à l’entier le plus proche, précédées par 6 zéros, et séparées par des virgules, avec le mot raw en début de chaque ligne.
L’exemple imucal.ino de la bibliothèque Adafruit pour le LIS3MDL met en œuvre ce formatage particulier. Lors des mouvements de rotation imprimés au magnétomètre pour le calibrage, on voit progressivement se dessiner une sphère dans la fenêtre graphique de MotionCal. Quand la sphère est complète et centrée, on peut arrêter la procédure et relever les valeurs figurant dans le cadre vert, voir la figure 3.
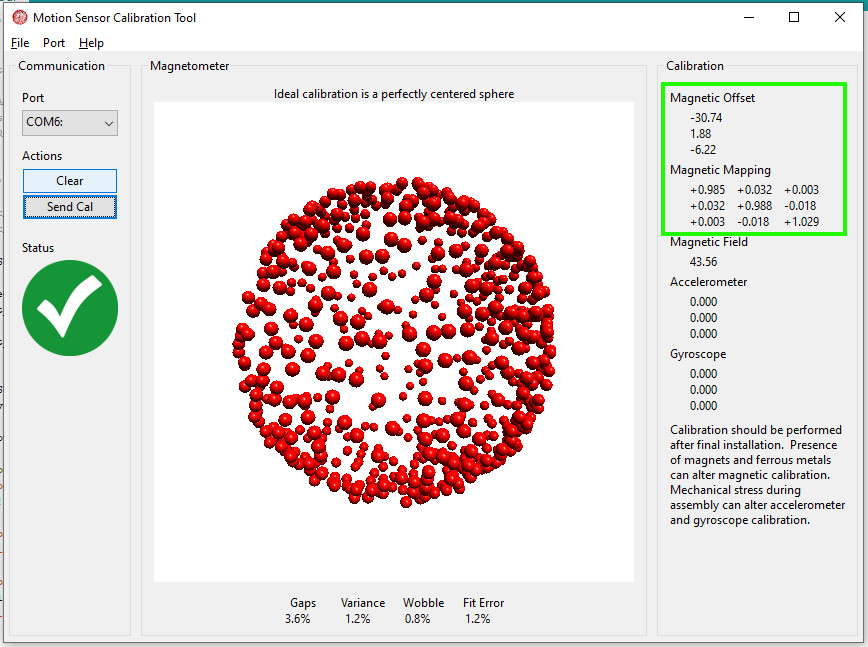
Les deux outils, Magnéto v1.2 et MotionCal, fournissent chacun deux matrices de nombres décimaux ; leur comparaison montre que les deux logiciels fournissent des coefficients quasiment identiques. Il reste à exploiter ces coefficients dans le logiciel d’application utilisant le magnétomètre, de façon à réaliser la compensation fer dur et fer doux.
On peut bien sûr objecter à cette procédure de calibrage qu’elle ne concerne que le magnétomètre lui-même, avec l’éventuel microcontrôleur qui lui serait directement rattaché, ainsi que le boîtier qui protège l’ensemble, avec la connectique, mais avant fixation à la structure de l’avion. Cette dernière peut en effet générer également des perturbations magnétiques.
Mais il n’est généralement pas possible de faire tourner rapidement l’ensemble de l’avion sur ses trois axes, sauf évolutions serrées en voltige. D’où l’intérêt de choisir soigneusement l’emplacement du magnétomètre, le plus à distance possible des perturbations magnétiques.
Il est cependant possible de réaliser en vol un enregistrement des données brutes du magnétomètre, dans toutes les positions possibles de l’avion en fonction de son domaine de vol, et dans tous les azimuts. Après le vol, il faut soumettre cet enregistrement à Magneto 1.2 ou à MotionCal, pour voir si les coefficients ainsi obtenus sont différents de ceux obtenus en faisant simplement tourner manuellement le boîtier du magnétomètre comme décrit ci-dessus.
La procédure de compensation fer dur et fer doux
Pour appliquer les coefficients de calibration obtenus à l’étape précédente, il faut faire le produit d’une matrice 3×3 par une matrice 3×1. Le lecteur pourra se référer à un cours élémentaire de calcul matriciel (par exemple ici ou là) pour comprendre l’algorithme.
Le calcul à réaliser est le suivant :
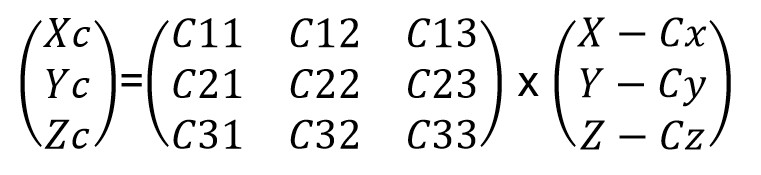
où Xc, Yc et Zc sont les valeurs compensée, C11 à C33, ainsi que Cx, Cy et Cz sont les coefficients qui ont été calculés par MotionCal ou Magneto 1.2, et X, Y, et Z sont les valeurs brutes issues du magnétomètre.
Si on reprend par exemple les valeurs brutes citées plus haut, à savoir « -52.27 -8.07 -40.49 » , et qu’on veut leur appliquer une compensation avec les coefficients de la figure 3, cela donne :

D’où :
Xc= 0,985 x (-52,27+30,74) + 0,032 x (-8,07-1,88) + 0,003 x (-40,49 + 6,22) = -21,63
Yc= 0,032 x ( -52,27+30,74 ) + 0,988 x ( -8,07-1,88 ) -0,018 x ( -40,49 + 6,22 ) = -9,90
Zc = 0,003 x ( -52,27+30,74 ) -0,018 x ( -8,07-1,88 ) + 1,029 x ( -40,49 + 6,22 ) = -35,15
Exemple du code correspondant :
#include <Adafruit_LIS3MDL.h>
Adafruit_LIS3MDL lis3mdl;
#define LIS3MDL_ADDRESS 0x1C
// Variables pour stocker les données brutes du magnétomètre
float magx, magy, magz;
// Données correctives issues de la calibration du magnétomètre. Ces données sont applicables à des mesures en µTesla.
float MagOffset[3] = {-30.74, 1.88, -6.22}; // Offsets pour les axes x, y et z
float mCal[3][3] =
{
{+0.985, +0.032, +0.003},
{+0.032, +0.988, -0.018},
{+0.003, -0.018, +1.029}
};
// Variables pour stocker les données magnétiques corrigées
float magxc, magyc, magzc;
float capmagnetique;
void setup() {
lis3mdl.begin_I2C(LIS3MDL_ADDRESS, &Wire1);
}
void loop() {
lis3mdl.read(); // Acquisition de X, Y et Z
magx = lis3mdl.x/68.42; //Conversion des données digitale brutes en µTesla
magy = lis3mdl.y/68.42; //voir datasheet LIS3MDL p 8
// (https://www.st.com/resource/en/datasheet/lis3mdl.pdf)
magz = lis3mdl.z/68.42;
// Calcul du produit des matrices
magxc = mCal[0][0]*(magx-MagOffset[0])+ mCal[0][1]*(magy-MagOffset[1]) + mCal[0][2]*(magz-MagOffset[2]);
magyc = mCal[1][0]*(magx-MagOffset[0])+ mCal[1][1]*(magy-MagOffset[1]) + mCal[1][2]*(magz-MagOffset[2]);
magzc = mCal[2][0]*(magx-MagOffset[0])+ mCal[2][1]*(magy-MagOffset[1]) + mCal[2][2]*(magz-MagOffset[2]);
}Le calcul du cap magnétique
Une fois le magnétomètre calibré, et les coefficients de calibration appliqués aux valeurs brutes, on a les éléments pour calculer un cap magnétique.
Dans le cas le plus simple où le magnétomètre est strictement horizontal, l’axe z est vertical et sa composante de champ magnétique n’intervient pas dans le calcul. Le cap magnétique (en degrés, de 0 à 360) peut alors être obtenu très simplement par les deux lignes de code suivantes :
capmagnetique = atan2(magyc,magxc)*(180/PI);
if (capmagnetique<0) capmagnetique+=360;Mais ce cas simple n’est pas adapté à l’avion où il faut prendre en compte les angles de roulis et de tangage, et donc la mesure selon l’axe z du champ magnétique. Dans un avion, les angles de roulis et de tangage sont transmis par l’AHRS de l’EFIS. Il ne faudrait pas se fier aux indications d’un simple accéléromètre, car en virage, la force centrifuge ne permettrait pas à ce dernier de fournir une référence verticale dans le repère terrestre.
Avant de calculer le cap magnétique, il faut donc préalablement effectuer un calcul de compensation pour les inclinaisons de l’avion selon les axes de roulis et de tangage (tilt compensation). Ce calcul permet de déterminer les deux composantes Xh et Yh dans un plan horizontal, en fonction des composantes triaxiales mesurées et calibrées plus haut, Xc, Yc et Zc.
Les équations sont les suivantes :
Xh = Xc * Cos(pitch) + Zc * Sin(pitch)
Yh = Xc * sin(roll) * sin(pitch) + Yc * cos(roll) – Zc * Sin(roll) * Cos(pitch)
Et le code permettant d’obtenir un cap magnétique exact en fonction de l’attitude de l’avion et des données calibrées du magnétomètre devient donc:
Xh = magxc * cos(pitch) + magzc * sin(pitch);
Yh = magxc * sin(roll) * sin(pitch) + magyc * cos(roll) - magzc * sin(roll) * cos(pitch);
capmagnetique = atan2(Yh,Xh)*(180/PI);
if (capmagnetique<0) capmagnetique+=360;La réalisation pratique du compas digital
Dans leur très grande majorité, les magnétomètres ont une sortie I2C et/ou SPI, tout comme le LIS3MDL. Ces interfaces ne sont pas prévues pour faire transiter des signaux sur une grande longueur. On a vu par ailleurs qu’un bon emplacement devait se trouver à distance des perturbations magnétiques, notamment celles liées au moteur et au tableau de bord.
Pour ces raisons, nous avons choisi d’associer, dans le même boîtier, le magnétomètre et un microcontrôleur. Ce dernier est chargé de transmettre les mesures au boîtier principal de l’EFIS, situé sur le tableau de bord, via un CAN bus. En effet, ce bus très rapide autorise les grandes longueurs, avec une excellente immunité face aux interférences électromagnétiques.
Le CAN Bus implémenté dans notre projet est particulièrement simple, il comporte pour l’instant seulement six nœuds, à savoir le module magnétomètre distant dont il est question sur cette page, le module EFIS, le module AHRS, l’EMS , le micro-EMS, et l’enregistreur de vol ESP32. Nous nous sommes donc affranchis des lourdes contraintes et préconisations du protocole CANaerospace.
L’emplacement choisi dans un saumon d’aile est également propice à l’installation d’un capteur de température et d’humidité. Ce dernier est nécessaire au calcul de l’altitude-densité. Nous avons fait le choix du module Adafruit « SHT-30 Mesh-protected Weather-proof Temperature/Humidity Sensor », product ID 4099.
La carte microcontrôleur est une Teensy 4.0, associée à un transceiver CAN bus MCP2562EP. Les connexions au CAN bus et au capteur de température et d’humidité se font par une prise SUB-D 9 broches.
Tout comme le module AHRS, le module compas digital doit être parfaitement aligné avec les trois axes de roulis, de tangage et de lacet de l’avion en ligne de vol horizontal rectiligne. Pour cela, dans un hangar ou au parking, il faut mettre l’installation électrique de l’avion sous tension, puis caler très précisément en hauteur les roues de l’avion pour que l’horizon artificiel soit parfaitement horizontal. Un simple niveau à bulle est alors suffisant pour caler le module magnétomètre horizontalement à 0,1° près en tangage comme en roulis (fig. 4).

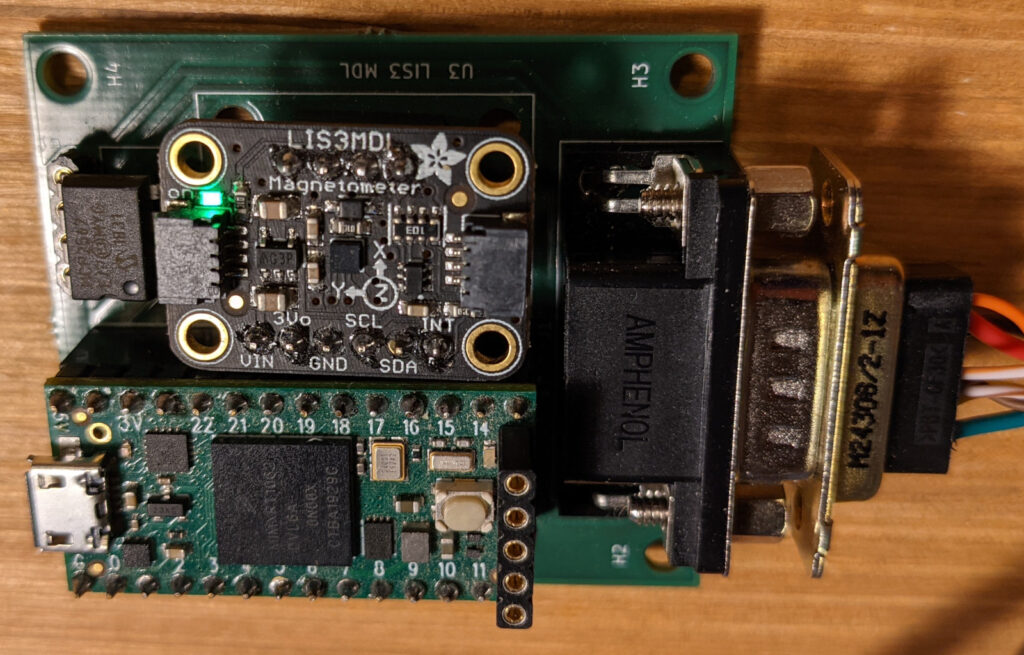
L’orientation du module compas digital (fig. 5) est la suivante : les cartes Teensy et LIS3MDL sont sur le dessus, la LIS3MDL vers l’avant, et le connecteur D-SUB est à droite.
Résultats
Ce module distant, magnétomètre et capteur de température et d’humidité, a été testé en vol avec succès. Par rapport à l’EFIS Dynon monté sur le tableau de bord, les caps magnétiques sont identiques à plus ou moins 5 degrés, la température extérieure est identique à plus ou moins 0,5 °C. L’altitude-densité, dont le calcul fait appel à la température extérieure et à l’humidité relative, est plus difficilement comparable avec celle affichée par le Dynon qui ne comporte pas de capteur d’humidité, elle est généralement dans une fourchette de plus ou moins 250 pieds avec celle du Dynon, ce qui est parfaitement cohérent avec l’influence de l’humidité relative.
Bonjour Jean-Guy,
Merci pour vos aimables commentaires.
Bonne continuation !
Benjamin
Bonjour Benjamin, merci d’avoir une fois de plus répondu avec autant de patience! Je comprends tout à fait votre observation sur l’objet social de votre site, mais vous m’avez permis de comprendre énormément de choses quand même un peu compliquées sur le sujet magnétomètre-accéléromètre-gyroscope et de manipuler ces objets avec quelques résultats. J’ai grâce à vous maintenant des idées plus claires sur les possibilités et limites de ces instruments, ainsi que sur les possibilités et limites des cartes arduino de base pour gérer les algorithmes de fusion des données , et je pense que la précision dont vous parlez en annoncant vos résultats – environ 5° – est bien celle à laquelle il faut s’attendre. Je vais continuer ma route dans cet univers passionant dont vous m’avez ouvert les portes, tout en gardant un oeil sur les performances du micro compas liquide à cardan incorporé dans mon pilote… Merci encore, bravo pour votre site et bon vols!
Bonjour Jean-Guy,
Je ne connais pas le MMC56x3, ni la bibliothèque qui l’exploite. Effectivement les axes peuvent constituer un vrai piège, idem d’ailleurs pour les accéléromètres et les gyromètres. J’en ai fait l’expérience ! Bravo d’avoir trouvé la solution pour ce magnétomètre, cela pourra peut-être servir à d’autres utilisateurs ! Le partage d’expérience est toujours intéressant.
La problématique du compas digital en bateau est peut-être plus simple qu’en avion. Même aux allures portantes avec un bon vent et une mer en rapport, un accéléromètre triaxial est peut-être suffisant pour permettre une bonne compensation en roulis et tangage, et donc une indication fiable du cap. Mais l’ajout d’un gyroscope triaxial est probablement nécessaire dans ces conditions d’allure et de mer qui entraînent en permanence des variations d’accélérations importantes. Mais ce n’est pas le sujet du site AvionicsDuino !
Benjamin
Bonsoir Benjamin,
Maintenant que j’ai refait une installation propre du module avec un fil d’un mètre de long, je peux l’éloigner et constater que oui, il y a une nette incidence de la présence de l’ordi, les choses redeviennent normales!
Cordialement,
Jean-Guy.
Bonsoir Benjamin, merci de continuer à répondre à mes balbutiements! Oui, j’ai vu ça cet après midi, il faut un accéléromètre et pas un gyroscope. Et je m’enhardis, en rêvant à un compas électronique pour remplacer le compas magnétique/optique tradi du pilote de mon bateau. Bien sûr, j’ai pensé à des perturbations par l’ordi, alors je l’ai fait tourner dans tous les sens autour et au-dessus du MMC56x3, mais surprise, pas de perturbation visible. J’ai aussi vérifié avec tout ce qui est en métal sur mon bureau ou dans les tiroirs, mais rien non plus. Et j’ai aussi contrôlé avec la boussole de l’iphone. En revanche, ce qui suit est plus rigolo: en continuant mes promenades sur internet, je suis tombé sur un site Digikey « comment calibrer un magnétomètre », alors j’ai regardé la vidéo, et là, surprise, en fin de vidéo, je vois que le breakout utilisé est un LIS3DML, avec un petit écran afficheur, qu’il est quasiment posé sur un iphone pour montrer que le cap affiché est le même que celui de l’iphone, mais surtout, que c’est le vecteur y de la sérigraphie qui indique le cap… – moi je croyais que c’était x – et que la formule atan2 commence par -1… Alors, je reprends mon MMC56x3, je l’oriente selon y, mais le résultat est mauvais, je m’énèrve un peu, je mets-1 comme multiplicateur dans la formule, ça ne marche pas, je remets la formule en l’état initial et je retourne le MMC56x3 cul par dessus tête dans mon montage, donc sérigraphie sur la face du dessous, avec le vecteur Y vers le nord: et là, j’ai un superbe 0! Vers le sud: 180! Evidemment, avec mon module « à l’envers », la composante verticale du champ terrestre n’agit pas pareil… c’était donc cela mes écarts ?
Mais vers l’est..270 et naturellement 90 vers l’ouest. J’en conclue que mon système tourne dans le mauvais sens, et je modifie la formule de calcul avec -x au lieu de +x: et ça marche! Je me demande bien ce que vous allez en penser… Merci encore de m’accompagner dans cette conversation, ça me pousse à progresser et je vais refaire une calibration pour voir!
JEAN-GUY
Bonjour Jean-Guy,
Est ce que toutes vos difficultés ne pourraient pas s’expliquer par la trop grande proximité entre le magnétomètre et votre PC, qui génère de forts champs magnétiques ?
Pour notre application aéronautique, les angles de roulis et de tangage sont fournis par l’AHRS. Mais pour une application statique, un simple accéléromètre peut faire l’affaire, vous trouverez facilement de nombreux didacticiels dans ce sens sur Internet.
Benjamin
Bonsoir Benjamin,
Ce soir, réels progrès formels! D’abord j’ai trouvé la raison des plantages et des arrêts de la liaison I2C, en cause, tout bêtement, le chargeur de l’ordi; je suppose qu’il envoie un parasite aléatoire, que la batterie de l’ordi n’arrive pas à absorber, en tout cas le problème disparait en débranchant le chargeur et en travaillant sur la batterie. Et d’un! Ensuite, un nouveau grand merci pour votre suggestion de CoolTerm, très facile, convivial, efficace, j’ai donc pu constituer un fichier pour Magneto 2.1 et j’ai pris soin de bien faire tourner selon chaque axe, plus quelques huits « à toutes fins utiles ». J’ai ensuite copieusement pillé votre exemple, aussi bien pour le choix initial de la donnée « magnetic field » que pour le sketch Arduino: Un grand merci supplémentaire!
Malheureusement, le mieux que j’ai pu arriver à faire pour la diagonale « combined scale factors » a été de 1.46 à 1.09 et 0.97, les deux dernières valeurs ok, la première pas terrible. Mais enfin, tout cela est de l’apprentissage, et donc très positif. En revanche, une fois les données inscrites dans Arduino et téléversées dans le module, il indique toujours le nord vers l’ouest sud ouest (au 245 exactement), puis en tournant « clockwise », le cap compas monte très paresseusement de l’ordre de 3° pour 10 réels, atteint la valeur maxi de 67° au 87, redescend pour arriver à 0 au 125, de là remonte à 359 au 126 (il y a donc 2 nord!), redescend, remonte et finit son tour au 245 comme il avait commencé. Donc du grand n’importe quoi…
J’ai donc recommencé un processus, cette fois avec MagCal. Comme vous l’aviez suggéré, il y a bien dans Adafuit une librairie qui contient un sketch pour fabriquer le fichier. Donc pas de problème de ce côté-là. Ensuite je me suis efforcé de fabriquer la belle sphère régulière et j’ai eu le plaisir de voir les boutons clear et send cal passer en surbrillance. Au total, ma sphère n’est pas très jolie mais son « Magnetic mapping » est mieux qu’avec Magneto 1.2. J’ai donc tout remis dans Arduino, téléversé et regardé le résultat. A part le zéro qui reste obstinément à l’ouest (au 265), les autres points cardinaux sont plus ou moins en correspondance relative avec le faux nord, et le compas veut bien aller de 0 à 360°: donc un grand progrès! Et je pense avoir compris le processus MagCal. Donc je vais arrêter avec le MMC56x3 et je vais approvisionner un LIS3MDL, je pourrai de la sorte comparer mes résultats avec ceux que vous publiez. A ce stade, cependant, une question: Je suppose que pitch et roll proviennent de vos autres capteurs et que sans eux un gyroscope est nécessaire?
Encore merci, bien à vous.
Bonjour Jean-Guy,
Merci pour votre aimable commentaire.
Dans la version 2 de l’IDE Arduino, il n’est plus possible de faire de très longs copier-coller dans la fenêtre du moniteur série, comme on pouvait le faire avec la version 1.
La solution consiste à utiliser un autre terminal comme coolTerm, téléchargeable ici. Ce terminal permet d’enregistrer des captures de longue durée dans un fichier texte.
Concernant MotionCal, le formatage des données n’est pas le même qu’avec Magneto12. L’exemple imucal.ino de la bibliothèque Adafruit pour le LIS3MDL met en œuvre ce formatage particulier pour MotionCal. Peut-être pourriez-vous vous en inspirer si la bibliothèque que vous utilisez pour le MMC5603 d’Adafruit ne fournit pas un exemple dédié MotionCal.
Mais vos difficultés avec MotionCal ne sont peut-être pas liées à un mauvais formatage des données… Si la fenêtre de MotionCal affiche un « gros boudin serré erratique« , c’est peut-être que vous ne faites pas décrire au magnétomètre des mouvements selon ses trois axes, mais selon deux axes seulement ou préférentiellement.
Et pourquoi ça « stoppe assez vite » et pourquoi « ça plante » ? C’est bien difficile à dire… Peut-être pourriez-vous faire des essais avec un autre microcontrôleur, ou un autre ordinateur ? Attention, MotionCal entre en compétition avec l’IDE Arduino pour la connection au port COM. Il est préférable de lancer uniquement MotionCal et de fermer l’IDE.
Benjamin
Bonjour, je n’ai pas d’avion et je débute avec les magnétomètres, et comme votre site est formidablement bien fait et intéressant, j’ai entrepris d’essayer de calibrer un MMC5603 d’Adafruit pour me faire les dents… et je plante!
Pour utiliser Magneto12, j’arrive à créer la liste x,y,z sur mon écran en tant que moniteur Arduino, mais pas à recopier dans un .txt, « copier » avec la souris ne marche pas et surbrillance puis Ctrl C ne me rapporte que les quelques lignes visibles à l’écran alors que j’ai bien mis en surbrillance plusieurs pages du moniteur: mes compétences Windows sûrement à revoir, mais vous, comment faites-vous?
Pour utiliser MotionCal, ça démarre bien mais sous la forme d’un gros boudin serré erratique et ça stoppe assez vite: trop de points pour la place mémoire? Evidemment, je vais très lentement, mais si je vais vite, ça plante… Plusieurs essais, jamais eu le début d’un cercle…
Merci d’avance pour vos conseils, si vous le voulez bien!
Je viens d’essayer les deux versions indiquées la 0.3.8 sans modif du code et la 0.5.0 avec modif dans le code.
Elles téléchargent sans problème et donnent le même résultat en température et hygrométrie. .
Parfait.
Encore un gros merci pour tout le travail que tu effectues.
Bonjour Stephaner,
La bibliothèque SHT31 à utiliser est celle de Rob Tillaart, comme indiqué dans le code à la ligne 40. Quelle version de cette bibliothèque utilisez-vous ?
J’utilisais la version 0.3.8 de cette bibliothèque, et le sketch compilait sans erreur. Mais en consultant le dépot GitHub de Rob Tillaart, je viens de m’apercevoir que cette bibliothèque a évolué, et qu’à partir de la version 0.5.0, il y a eu un « breaking change » concernant la fonction begin. J’ai donc mis à jour ma bibliothèque vers la version 0.5.0. Sans rien changer au sketch, j’ai obtenu sans surprise exactement la même erreur que vous. Ce qui m’a conduit à modifier très légèrement le sketch, à la ligne 137 : il suffit de remplacer
sht.begin(SHT31_ADDRESS);parsht.begin();. Et le sketch compile à nouveau normalement. Je n’ai pas encore mis à jour en conséquence dans mon avion le programme du module distant magnétomètre-thermomètre-hygromètre, j’espère que cette nouvelle version de bibliothèque ne va pas entraîner d’autres effets secondaires imprévus…J’ai reporté cette nouvelle correction du programme du magnétomètre dans GitHub. Merci de m’avoir signalé cette erreur.
Concernant l’AHRS, en cas de problème persistant, je vous laisse le soin de poster un commentaire sur la page AHRS.
Benjamin
Bonjour Benjamin .
Je suis passé a la version 1.59.4 de Teensyduino. AHRS téléversé mais pas de résultat a l’écran …
Quand au magnetometre j’ai toujours une erreur malgré la nouvelle version de teensyduino et le nouveau code . Voici le retour a la compile : no matching function for call to ‘SHT31::begin(int)’
et la ligne 137 en surbrillance.
Bonsoir Benjamin. merci pour ce temps que tu passes a cooriger nos boulettes que mon incompétence m’empêche de résoudre seul! la compil bloque encore malgré les différents essais avec differentes versions. Voici ou ça bloque .
« C:\\Users\\steph\\AppData\\Local\\Temp\\arduino_build_281651\\sketch\\EFIS_Remote_Module_AvionicsDuino.ino.cpp.o »
EFIS_Remote_Module_AvionicsDuino: In function ‘void setup()’:
EFIS_Remote_Module_AvionicsDuino:137: error: no matching function for call to ‘SHT31::begin(int)’
137 | sht.begin(SHT31_ADDRESS);
| ~~~~~~~~~^~~~~~~~~~~~~~~
In file included from C:\Users\steph\Desktop\Magnetometre\EFIS-Remote-Module-AvionicsDuino-main\EFIS_Remote_Module_AvionicsDuino\EFIS_Remote_Module_AvionicsDuino.ino:77:
C:\Users\steph\Documents\Arduino\libraries\SHT31-master/SHT31.h:49:11: note: candidate: ‘bool SHT31::begin()’
49 | bool begin();
| ^~~~~
C:\Users\steph\Documents\Arduino\libraries\SHT31-master/SHT31.h:49:11: note: candidate expects 0 arguments, 1 provided
no matching function for call to ‘SHT31::begin(int)’
Bonjour Stephaner,
Tous mes vœux également pour 2024 ! Bravo pour les adaptations en cours.
Le problème de compilation du magnétomètre m’a été signalé tout récemment à l’occasion d’un commentaire sur la partie anglaise du site, vous pouvez aller y consulter ma réponse. Il y avait un bug dans le programme, je l’ai corrigé sur GitHub, vous pouvez donc télécharger la version corrigée.
Certains constructeurs ont également eu des problèmes de compilation du programme de l’AHRS, liés à un bug de TeensyDuino. Je vous invite à aller voir les commentaires les plus récents sur la page en anglais de l’AHRS. J’y ai indiqué les versions de TeensyDuino et des bibliothèques qui permettent une compilation sans erreur.
Benjamin
Bonjour Benjamin .
Tout mes voeux pour cette année 2024 a commencer par la santé, chose primordiale.
bien avancé sur EFIS et EMS les ecrans 7″ fonctionnent et sont adaptés et j’ai même réussi à refaire des affichages qui me conviennent mieux. le micro ems est injecté.
Aujourd’hui je bloque sur la compilation du magnetometre. J’ai le message suivant : wire’ was not declared in this scope et n’arrive pas a le solutionner….et AHRS plante aussi mais chaque chose en son temps.