
(Mesure du courant, page mise à jour par Benjamin le 05/11/2022)
Un courant électrique est un flux d’électrons qui se déplacent dans un conducteur. En tant que tel, il ne peut pas être mesuré directement. Mais les effets d’un courant sont mesurables. Quand un courant parcourt un conducteur, il se produit une chute de tension due à la résistance intrinsèque de ce conducteur, conformément à la loi d’Ohm. Cette chute de tension est proportionnelle à l’intensité du courant, et elle est facilement mesurable. De plus, comme Œrsted l’a découvert, un champ magnétique est généré autour d’un fil dont les extrémités sont connectées aux bornes d’une pile. Et ce champ est mesurable. Ces deux phénomènes sont à la base de la technologie des capteurs de courant.
D’innombrables modèles de capteurs de courant ont été développés sur ces bases, et adaptés à différents besoins : courant continu ou alternatif, étendue de la gamme de courant à mesurer, sens du courant (uni ou bidirectionnel), précision requise, coût, consommation propre du capteur, nécessité ou non d’une isolation… etc.
Cahier des charges
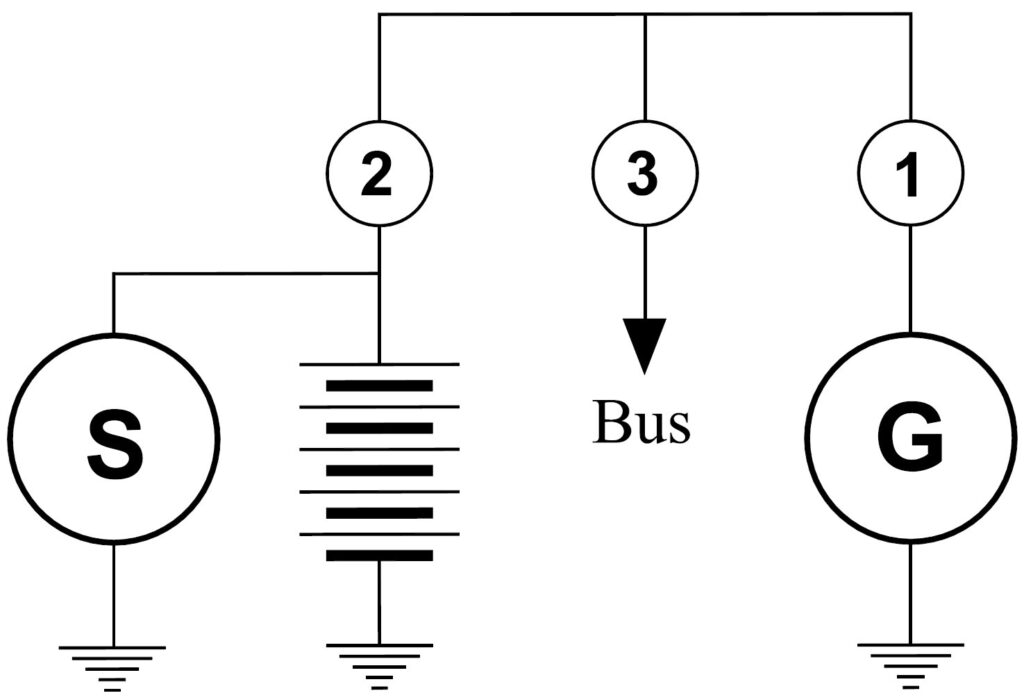
Dans un avion, une mesure d’intensité peut être envisagée principalement à trois emplacements (fig. 1), dans le but de surveiller :
- le processus de charge-décharge de la batterie (emplacement 2), un capteur bidirectionnel est alors nécessaire,
- la génération électrique (emplacement 1),
- la consommation des différents systèmes installés (emplacement 3).
Il n’y a pas de nécessité de mesurer le courant transitoire de très haute intensité dans le circuit du démarreur. Dans un avion léger, les courants à mesurer ont une intensité basse ou moyenne (généralement dans la gamme -20 à +20 ampères), et les tensions sont basses (le plus souvent 12-14 volts). Un capteur isolé n’est pas nécessaire, tous les éléments partagent la même masse. La précision nécessaire est de l’ordre de 0,1 A. Comme habituellement sur ce site, la maîtrise des coûts est importante.
Sur la base de ce cahier des charges, deux types de capteurs peuvent être envisagés : les capteurs à effet Hall et les shunts. Le capteur à effet Hall génère une tension de sortie qui dépend du champ magnétique créé par le courant, c’est cette tension qui est mesurée pour en déduire l’intensité. Un capteur de type shunt est une résistance de puissance de très faible valeur, le courant qui le traverse produit une tension aux bornes du shunt, cette tension est proportionnelle à l’intensité. Dans les deux cas, la tension générée par le capteur est très faible ; il convient de l’amplifier pour pouvoir la mesurer.
Les capteurs à effet Hall
Plusieurs fournisseurs proposent des modules économiques à base de capteurs de courant à effet Hall. Par exemple, ici ou là. Pour la plupart, ces modules sont équipés de capteurs Allegro Microsystem. Ces modules sont adaptés à nos besoins, ils sont simples à mettre en œuvre, précis et disponibles en versions mono ou bidirectionnelles.
Leur inconvénient majeur est la très petite taille du conducteur interne au circuit intégré par lequel passe tout le courant à mesurer. Ce qui pose potentiellement un sérieux problème de sécurité. Que se passerait-il en cas de surcharge ou de fusion du capteur ? Une panne électrique en vol est toujours une situation assez désagréable… C’est pour cette raison que nous avons choisi de ne pas utiliser ces capteurs à effet Hall économiques.
Certains capteurs à effet Hall sont spécialement conçus pour un usage aéronautique, comme par exemple celui-ci. Ils ne posent pas le même problème de sécurité que les précédents, mais ils sont nettement plus onéreux. De plus, le positionnement du câble électrique par rapport au capteur semble assez approximatif, ce qui peut faire craindre des mesures imprécises et non reproductibles. Nous n’avons pas l’expérience de ces capteurs.
Les capteurs de type shunt
Quasiment tous les ampèremètres installés sur les avions légers sont en fait de type shunt. Les seuls inconvénients de cette technique de mesure sont la chute de tension liée à la résistance intrinsèque du shunt et la puissance dissipée par ce dernier. Si on considère un shunt 20A/50mV, un modèle très courant utilisé sur beaucoup d’avions, sa résistance n’est que de 2,5 milliohms. La chute de tension pour un courant de 20 ampères n’est que de 50 mV, et la puissance dissipée est alors d’un watt. Ce qui est en fait négligeable.
Comme indiqué plus haut, la tension aux bornes du shunt est très faible. Elle ne peut pas être mesurée directement par le convertisseur analogique-numérique (CAN) d’un microcontrôleur et nécessite une amplification. Il faut donc sélectionner un amplificateur et choisir l’emplacement du shunt : low-side (entre la masse et la charge) ou high-side (entre l’alimentation et la charge) (fig.2).
Emplacement du shunt et choix de l’amplificateur
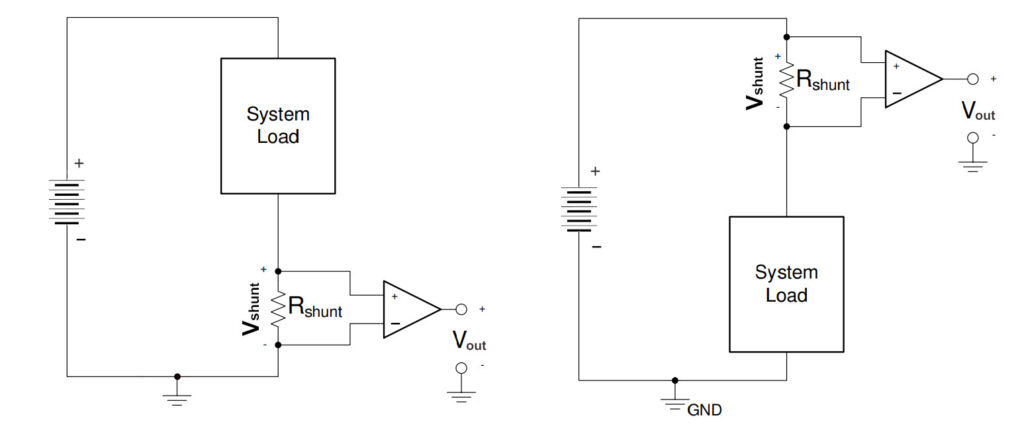
La technique high-side offre deux avantages par rapport à la technique low-side. Elle ne perturbe pas la masse de la charge, et elle permet de détecter instantanément un court-circuit à la masse dans la charge (référence ici). C’est donc la technique que nous avons choisie.
La technique high-side nécessite que l’amplificateur soit capable de supporter la tension élevée du bus électrique de l’avion. Parmi beaucoup d’autres, nous avons sélectionné les circuits Texas Instrument LMP860x pour les raisons suivantes : ce sont des amplificateurs opérationnels de mesure de courant qui peuvent fonctionner en mono ou en bidirectionnel, ils sont prévus pour une alimentation simple, il y a plusieurs versions, chacune avec un gain fixe précis, et la connexion entre les deux étages d’amplification est accessible sur deux broches, ce qui permet, grâce à une résistance externe, de modifier le gain. Ils sont donc particulièrement adaptés pour piloter un CAN à pleine échelle.
Circuit de mesure d’intensité de l’EMS
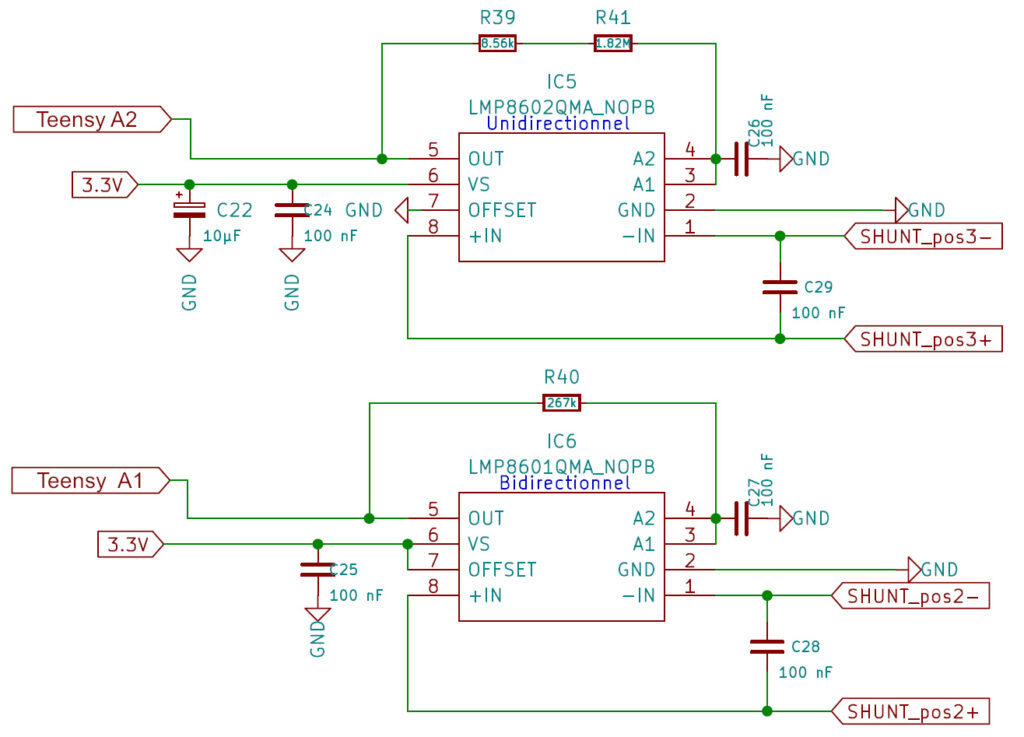
Pour l’EMS, nous avons fait le choix de surveiller le courant aux emplacements 2 et 3, comme défini dans la figure 1. Une simple addition arithmétique permettrait au besoin d’en déduire l’intensité au point 1. Un shunt Murata de 50mV/20 A a été monté sur les deux sites. L’étage d’entrée de mesure du courant de notre EMS est illustré sur la figure 3.
Pour l’emplacement 2, le courant est bidirectionnel, et nous avons choisi de mesurer la plage -20 à +20A. L’étendue de mesure est donc de 40A, soit 100 mV. Avec un gain de 32, 100 mV entre les deux broches d’entrée donnent 3,2 V sur la broche de sortie de l’amplificateur, ce qui correspond presque à la pleine échelle d’un CAN d’une carte Teensy 4.1. Le LMP8601 a un gain fixe de 20x. Ce gain doit donc être augmenté à 32x en ajoutant une résistance (R40, fig. 3) entre la sortie de l’amplificateur (IC6 broche 5, fig. 3) et la connexion entre les deux étages de l’amplificateur (IC6 broches 3 et 4). Cette résistance crée une rétroaction positive qui augmente le gain. La datasheet du LMP860x (page 24) fournit l’équation pour calculer la résistance R de R40 :
R = 105 x (G/(G-20))
Où G est la valeur souhaitée du gain. Pour G=32, cela donne 267 kΩ. Le courant est bidirectionnel, donc la broche d’offset (broche 7) est connectée à l’alimentation positive (+3,3 V).
Pour l’emplacement 3, le courant est monodirectionnel, et nous avons choisi de mesurer la gamme 0 à +20A. L’étendue de mesure est alors de 20A, soit 50 mV. Avec un gain de 64, 50 mV entre les deux broches d’entrée donnent 3,2 V sur la broche de sortie de l’amplificateur. Le LMP8602 a un gain fixe de 50x. Ce gain doit donc être augmenté à 64x en ajoutant une résistance (R39 et R41 en série, fig. 3) entre la sortie de l’amplificateur (IC5 broche 5, fig. 3) et la connexion entre les deux étages de l’amplificateur (IC5 broches 3 et 4) . Pour le LMP8602, l’équation est :
R = 4 x 105 x (G/(G-50))
Pour G=64, cela donne 1,828571 MΩ. Nous avons donc retenu les valeurs suivantes : 8,56 kΩ pour R39 et 1,82 MΩ pour R41. Le courant à mesurer est monodirectionnel, donc la broche d’offset (broche 7) est reliée à la masse.
Logiciel associé
Le code qui convertit une tension en une intensité en ampères est le suivant. Il s’agit d’un extrait de notre logiciel EMS.
#define pinIP3unidir A2
#define pinIP2bidir A1
float VpinIP3unidir, VpinIP2bidir, Ibus, Ibat;
void setup() {
//..............
pinMode(pinIP3unidir, INPUT_DISABLE);
pinMode(pinIP2bidir, INPUT_DISABLE);
//...............
}
void loop() {
/.................
int digitalValueA = analogRead(pinIP3unidir);
VpinIP3unidir = digitalValueA*3.3/1023.0;
//0 volts ---> 0A et 3.2 volts -> 20A d'où 3.3 volts -> 20.625A, donc
Ibus=(VpinIP3unidir*20.625)/3.3;
int digitalValueB = analogRead(pinIP2bidir);
VpinIP2bidir = digitalValueB*3.3/1023.0;
//3.2 volts -> +20A et 1.65 volts -> 0A, d'où 0.1 volts -> -20A, et 0 volts -> -21,29A, et 3.3 volts -> 21,29A, donc
Ibat=((VpinIP2bidir-1.65)*21,29*2)/3.3;
//.......................
}Dans l’EMS, la sortie de IC6 (intensité bidirectionnelle à l’emplacement 2) est connectée à la broche analogique A1 d’une carte Teensy 4.1. L’instruction analogRead() sur cette broche A1 fournit une valeur numérique sur 10 bits comprise entre 0 et 1023. L’instruction suivante convertit cette valeur numérique en une tension comprise entre 0 et 3,3 volts. Puis cette tension est convertie en une intensité en ampères.
On rappelle qu’en bidirectionnel, la moitié de l’échelle en volts, soit 1,65 volts, correspond au milieu de la gamme d’intensité choisie (-20 à +20A), soit 0 ampère. Comme on s’est donné une petite marge en choisissant le coefficient d’amplification de l’amplificateur pour que 20 ampères donnent 3,2 volts, et donc -20A donnent 0,1 volt, on en déduit facilement qu’une tension nulle en sortie de l’amplificateur correspond à -21,29A, et une tension de 3,3 volts correspond à +21,29A.
Un calcul similaire permet de convertir la tension en sortie de IC5, comprise entre 0 et 3,3 volts, en une intensité monodirectionnelle au point 3 comprise entre 0 et +20,625 ampères.